


三维空间磁场精密测量系统
2012/10/18 10:28:10
项目要求:
能够实现空间三维的磁场测量功能,磁探测头及探杆安装在移动平台上,移动平台带动测磁探头在磁场空间移动。测磁过程要求计算机编程自动控制。磁铁位置找正,测磁路径参数设定以后,能够进行自动测磁。生成位置点与测磁数据对应的磁场分布数据文件。
1) X最大行程1200mm,Y最大行程1000mm,Z最大行程500mm,各轴重复定位精度0.02mm,三维垂直度3’。
2) XY轴速度要求2~10mm/s,Z轴速度要求2~5mm/s。
3) 3轴都是用光栅尺检测位置,全闭环控制,Z轴有自锁要求。
4) 各轴由两个机械限位控制范围,一个光尺零点,中间加两个软限位可随意设置位置。
工作过程:
以测量四极磁铁磁场为例,四极磁铁的磁场区域为圆柱体形场。第一步找正,设定测磁原点(0点),需要用探头找正圆柱体形场的中点,找正后设定该点为圆柱体场的测磁原点(0点);第二步编程,在测磁原点建立磁场坐标系(笛卡尔坐标系Oxyz),在磁场坐标系中设定一组点(P1~P16)作为测磁点,编程使测磁探头顺序到达P1至P16点,到达每一点后需停留一定时间(比如5秒钟),然后读出磁场测量值,再移动至
下一点;第三步测量,按照编好的程序运行,使探头到达每一个测量点,并测得磁场数据,然后生成测磁数据文件(.txt或其它格式)。测磁数据文件中要有每个点的坐标值,及该点对应的磁场值。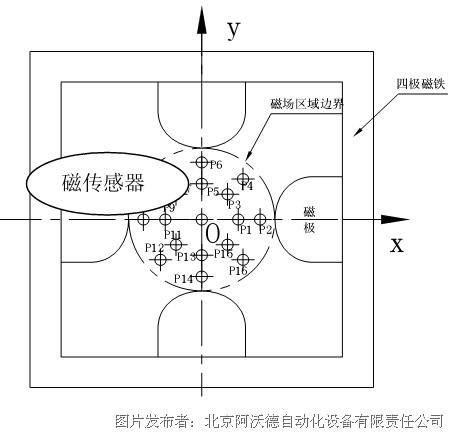
基本控制与流程控制:
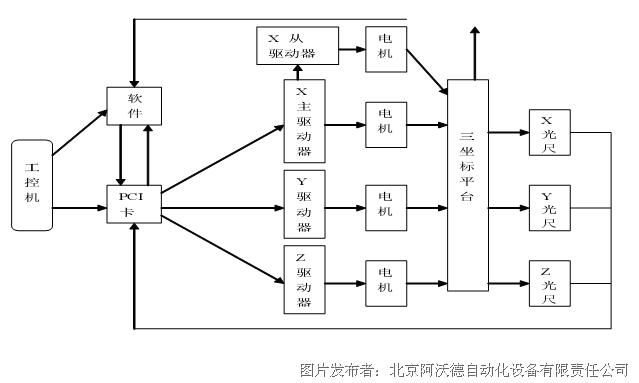
控制系统采用MOTEC PCI卡,3轴模拟全闭环控制;伺服电机系统采用MOTEC交流伺服,X轴使用两套伺服电机,主伺服同步驱动从伺服运动;光栅尺采用高精度MOTEC光栅尺。机械部分采用MOTEC三坐标大行程
平台,软件部分单独开发。
软件功能:
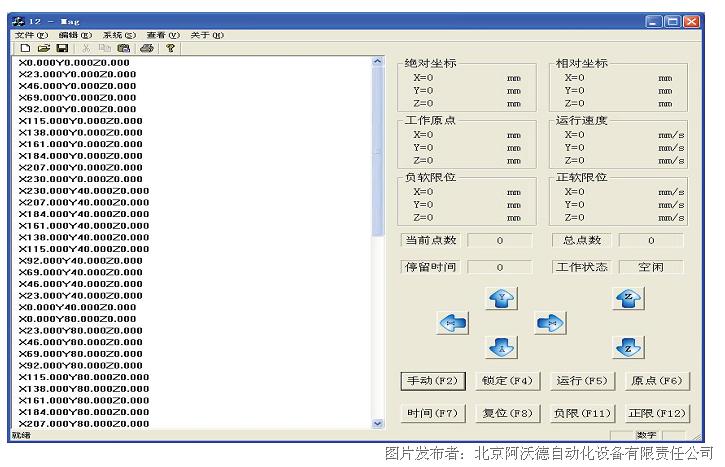
1. 读取数据txt文件,可方便进行编辑包括输入、剪切、复制、粘贴、删除、撤消、重做、查找、替换等,保存为txt文件。
2. 可进行PID调节,进行参数设置。
3. 查看I/O端口状态功能。
4. 进行文本编辑后,并且对当前数据进行锁定,防止意外修改。
5. 直观显示各种数据,坐标、速度、限位值、当前点、停留时间、工作状态等。
6. 可直接通过计算机面板进行机器移动,也可通过手轮进行移动。
7. 通过串口读取测量数值,输出测量数据txt文件,可设置输出路径。
8. 每条指令都进行语法错误判断,在运行中进行运 动错误判断、处理。
9. 软限位功能,能随意设置各轴正负软限位,将机器限制在某个阶段内。
10.矩阵功能,能对空间两点间形成的立体进行多点矩阵排列,蛇形移动。
结论:
此系统已成功应用,并且各项指标达到或超过客户要求,XYZ轴重复定位精度0.01mm,速度范围在1~100mm/s,机器运行平稳。软件开发考虑周全,符合客户要求,并且提供许多方便快捷的操作方式,菜单、按钮、快捷键多种方法操作;并且显示各种运行数据,比较直观。此系统只要替换为其它传感器如:压力、温度、超声等,便可应用测量工程。




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

MOTEC α系列 交流伺服系统

翠欧(TRIO) P823-MC403三轴运动控制器
松下伺服- 电机、驱动器

日本日机(NIKKI) 三自由度纳米平台

阿沃德荣获慧聪网工业机器人行业“配套件十大品牌”称号